
RAG EVALUATION WITH MLFLOW + LANGCHAIN
 If you've seen any of my other DS/ML content you know I'm a big fan of MLflow. The bottom line is that making a new model is typically the quick and easy part. It's figuring out how to make it consistent and how to improve it that are the hard part - and the key is being fastidious and objective about what you (and your team) know about the model and data that you're working with. This is equally true with GenAI language models and RAG as it is for classic machine learning and deep learning. MLflow 3 has an expansive feature set for GenAI development and quantifiable evaluation that provides a lot of the toolset straight out of the box (or "container" 🙂?).
If you've seen any of my other DS/ML content you know I'm a big fan of MLflow. The bottom line is that making a new model is typically the quick and easy part. It's figuring out how to make it consistent and how to improve it that are the hard part - and the key is being fastidious and objective about what you (and your team) know about the model and data that you're working with. This is equally true with GenAI language models and RAG as it is for classic machine learning and deep learning. MLflow 3 has an expansive feature set for GenAI development and quantifiable evaluation that provides a lot of the toolset straight out of the box (or "container" 🙂?).FLOW_MODELS: IMAGE GENERATION AND ANOMALY DETECTION AS TWO SIDES OF SAME COIN
 Normalizing flow models are invertible neural networks, a type of generative model that offers a nice two-for-one benefit: simultaneously enabling unsupervised learning for image anomaly detection (by mapping unlabeled images to a distribution where statistical anomaly detection techniques can apply) and also enabling image simulation (by mapping randomly generated samples from a probability distribution into the image space). Now it may not be my ultimate use case, but it turns out there are, you know, a ton of cat images and datasets on the internet, so let's experiment with INNs and cats!
Normalizing flow models are invertible neural networks, a type of generative model that offers a nice two-for-one benefit: simultaneously enabling unsupervised learning for image anomaly detection (by mapping unlabeled images to a distribution where statistical anomaly detection techniques can apply) and also enabling image simulation (by mapping randomly generated samples from a probability distribution into the image space). Now it may not be my ultimate use case, but it turns out there are, you know, a ton of cat images and datasets on the internet, so let's experiment with INNs and cats!VIM-MLFLOW PLUGIN TO BROWSE MLFLOW RESULTS IN VIM
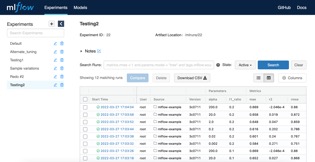
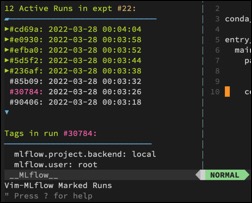 I love MLflow a lot, and I use it all the time for both work and personal projects. There are projects in which I go all-out and auto-log extensive graphical artifacts to better enable modeling improvements - like with example images for the different error cases, and ROC curves, and so on. And for those it's really nice to use its website as a one-stop UI to where those artifacts are logged and reviewed by others. But there are also a lot of projects where I really don't log much more than the modeling parameters and performance metrics, just numbers, and yet I'm still leaving my terminal-based workflow in Vim and looking up and comparing those numbers on the (in this case needlessly point-and-click) MLflow website. So I wrote this Vim plugin...
I love MLflow a lot, and I use it all the time for both work and personal projects. There are projects in which I go all-out and auto-log extensive graphical artifacts to better enable modeling improvements - like with example images for the different error cases, and ROC curves, and so on. And for those it's really nice to use its website as a one-stop UI to where those artifacts are logged and reviewed by others. But there are also a lot of projects where I really don't log much more than the modeling parameters and performance metrics, just numbers, and yet I'm still leaving my terminal-based workflow in Vim and looking up and comparing those numbers on the (in this case needlessly point-and-click) MLflow website. So I wrote this Vim plugin...PREDICTING BANK LOAN BEHAVIOR WITH RANDOM FOREST MODELS
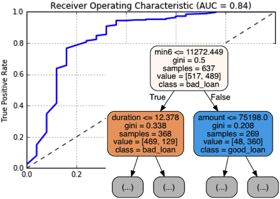 Let's implement a random forest classifier from Scikit-Learn to see how well we can predict whether a bank client will have good loan behavior (meaning they won't default or become delinquent) if they are given a new loan. We'll use a public bank transactions/loans dataset from the PKDD99 Challenge conference for the modeling. In the process we'll fit and explore the assumptions made for this model, and learn about some limitations of Scikit-Learn's tree-based models.
Let's implement a random forest classifier from Scikit-Learn to see how well we can predict whether a bank client will have good loan behavior (meaning they won't default or become delinquent) if they are given a new loan. We'll use a public bank transactions/loans dataset from the PKDD99 Challenge conference for the modeling. In the process we'll fit and explore the assumptions made for this model, and learn about some limitations of Scikit-Learn's tree-based models.POSTGRESQL+SCHEMASPY VIA DOCKER CONTAINERS
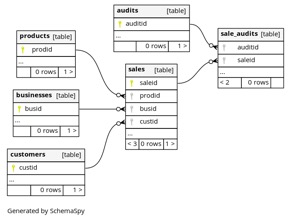 When prototyping a new database from its initializing SQL code, and wanting to examine details of its relational architecture or demonstrate it to others, it's really convenient to simply pull my aganse/quick_postgresql repo. I just pop in my table creation lines in init.sql, make run, and view the interactive SchemaSpy website generated at its internal port. As the database sticks around and grows into use, still it's really helpful as it evolves to be able to keep rerunning and updating that SchemaSpy website as a standard part of the workgroup toolset.
When prototyping a new database from its initializing SQL code, and wanting to examine details of its relational architecture or demonstrate it to others, it's really convenient to simply pull my aganse/quick_postgresql repo. I just pop in my table creation lines in init.sql, make run, and view the interactive SchemaSpy website generated at its internal port. As the database sticks around and grows into use, still it's really helpful as it evolves to be able to keep rerunning and updating that SchemaSpy website as a standard part of the workgroup toolset.SEMANTIC SQL EXPERIMENTATION WITH POSTGRESQL'S PGVECTOR EXTENSION
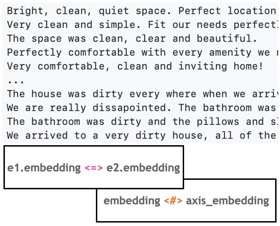 For some types of semantic analysis we don't always need to always pull big dataframes of data out of the database to do the analysis externally if we already have embedding vectors stored in the database. PostgreSQL's pgvector extension provides powerful functionality for semantic search and aggregation right there in the SQL queries. Let's experiment with some of this by grabbing an arbitrary dataset (how about Kaggle's Seattle AirBnB listings/reviews), popping that into a database, running an embedding model on that to create embedding vectors, and exploring SQL queries using this functionality.
For some types of semantic analysis we don't always need to always pull big dataframes of data out of the database to do the analysis externally if we already have embedding vectors stored in the database. PostgreSQL's pgvector extension provides powerful functionality for semantic search and aggregation right there in the SQL queries. Let's experiment with some of this by grabbing an arbitrary dataset (how about Kaggle's Seattle AirBnB listings/reviews), popping that into a database, running an embedding model on that to create embedding vectors, and exploring SQL queries using this functionality.MEDICAL IMAGE CLASSIFICATION BUILT WITH "MLFLOW PROJECTS"
 Let's explore a supervised learning problem in medical imaging based on a public dataset and MLFlow's "Projects" functionality. A self-contained modeling module is trained, has its performance logged in MLFlow, and is able to be checked out as a deployable model image. There's a configurable implementation of this in my aganse/py_tf2_gpu_dock_mlflow repo. Let's try the malaria detection dataset from the Tensorflow datasets, which contains a balanced, labeled dataset of about 27,000 thin blood smear slide images of cells, and let's see how well we can detect malaria parasite presence in the images. This dataset is used to train/test different variations of image classification models, including VGG-16 and various sizes of more basic convolutional networks.
Let's explore a supervised learning problem in medical imaging based on a public dataset and MLFlow's "Projects" functionality. A self-contained modeling module is trained, has its performance logged in MLFlow, and is able to be checked out as a deployable model image. There's a configurable implementation of this in my aganse/py_tf2_gpu_dock_mlflow repo. Let's try the malaria detection dataset from the Tensorflow datasets, which contains a balanced, labeled dataset of about 27,000 thin blood smear slide images of cells, and let's see how well we can detect malaria parasite presence in the images. This dataset is used to train/test different variations of image classification models, including VGG-16 and various sizes of more basic convolutional networks.GPT_CLIENT CLI WITH PARAMETER CONTROL, WEBLINK SUBMISSION, & SYNTAX HIGHLIGHTING
[This project is old but I find I'm using it again lately for a quick CLI way to test responses from different API model versions while injecting web content as I hone RAG apps.]
I have found OpenAI's GPT models to be fabulously productive tools and use them often in my technical work now. But to get what I want out of the models for my uses has taken accessing the models from the API rather than the ChatGPT website GUI.
 This allows me to change some of the model parameters, format the output as I wish, and run the whole thing in my terminal. Of course the process of making the app has provided highly useful education in understanding how the models work as well, including how interacting with them via API can enable no end of use cases from other automated code.
This allows me to change some of the model parameters, format the output as I wish, and run the whole thing in my terminal. Of course the process of making the app has provided highly useful education in understanding how the models work as well, including how interacting with them via API can enable no end of use cases from other automated code.DBSCAN CLUSTERING IN DECRYPTING AN IMAGE CYPHER
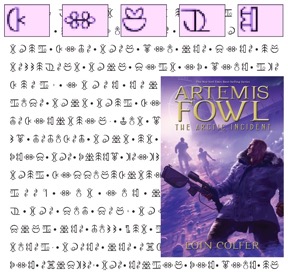 This wonderful kids' book series is fun not only for the stories themselves, but also because each of the first several books involves a cipher puzzle with "fairy hieroglyphics" - I love code puzzles! In the electronic form of the books I discovered the hieroglyphic sequence was moved to the back of the book, all perfectly lined up in matrices over a few pages at the end. And I thought, hey that seems like it'd be easy to parse and decrypt on a computer, just like the main character did!
This wonderful kids' book series is fun not only for the stories themselves, but also because each of the first several books involves a cipher puzzle with "fairy hieroglyphics" - I love code puzzles! In the electronic form of the books I discovered the hieroglyphic sequence was moved to the back of the book, all perfectly lined up in matrices over a few pages at the end. And I thought, hey that seems like it'd be easy to parse and decrypt on a computer, just like the main character did!INTERACTIVE GPS DATA VISUALIZATIONS IN PYTHON/JUPYTER
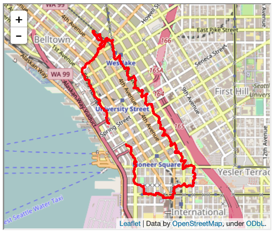 Did you know you can plot your geographic data on interactive maps embedded directly in your Python notebooks? Check it out, as we play with and analyze some GPS tracking data. A database of tracked walking routes data available on a health/fitness website provides a convenient trove of data not only to play with, but also to explore the geometric interference effects of downtown buildings upon GPS track solutions.
Did you know you can plot your geographic data on interactive maps embedded directly in your Python notebooks? Check it out, as we play with and analyze some GPS tracking data. A database of tracked walking routes data available on a health/fitness website provides a convenient trove of data not only to play with, but also to explore the geometric interference effects of downtown buildings upon GPS track solutions.GETTING MLFLOW+DATABASE RUNNING QUICKLY VIA DOCKER
 This provides a get-running-quickly Docker-compose setup using containers for MLflow, PostgreSQL, and NGINX. Run MLflow's database in PostgreSQL, and put an NGINX reverse proxy in front of the MLflow website to allow some level of access restriction (say for a workgroup within an already-firewalled company intranet).
This provides a get-running-quickly Docker-compose setup using containers for MLflow, PostgreSQL, and NGINX. Run MLflow's database in PostgreSQL, and put an NGINX reverse proxy in front of the MLflow website to allow some level of access restriction (say for a workgroup within an already-firewalled company intranet).